About Me
-
2023-Current
Research Center "E. Piaggio"
Post Doctoral Researcher
-
2021-Current
XStar Motion
Co-Founder
-
2019-2023
University of Pisa
Ph.D. in Robotics
-
02/2023-06/2023
University of Pisa
Teaching Assistant
-
04/2022-09/2022
Stanford University
Visiting Student Researcher
-
03/2020-06/2020
University of Pisa
Teaching Assistant
-
2018-2019
Research Center "E. Piaggio"
Junior Researcher
-
2015-2018
University of Pisa
M.Sc. Robotics and Automation
-
2012-2015
University of Pisa
B.Sc. Electronics
Hi! I'm Alessandro, currently a robotics Ph.D. student at the University of Pisa and former
visiting
researcher at the Stanford Artificial Intelligence Laboratory (SAIL), Stanford University. I am
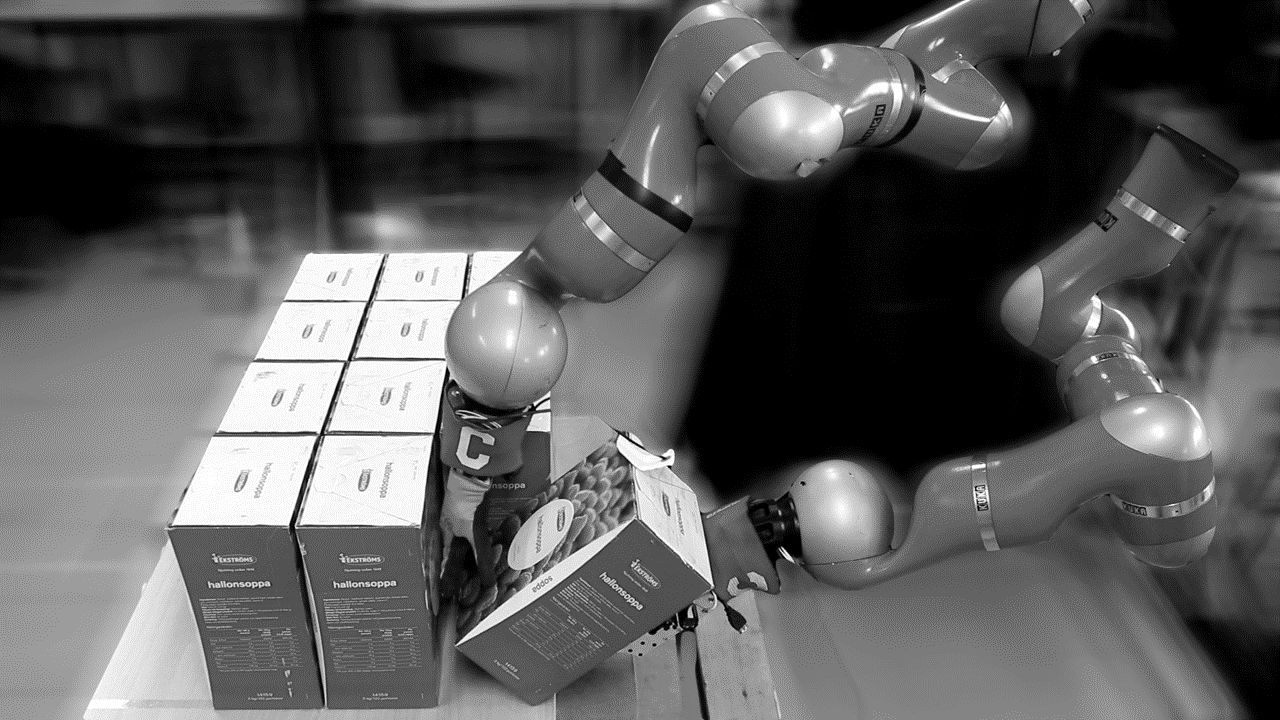
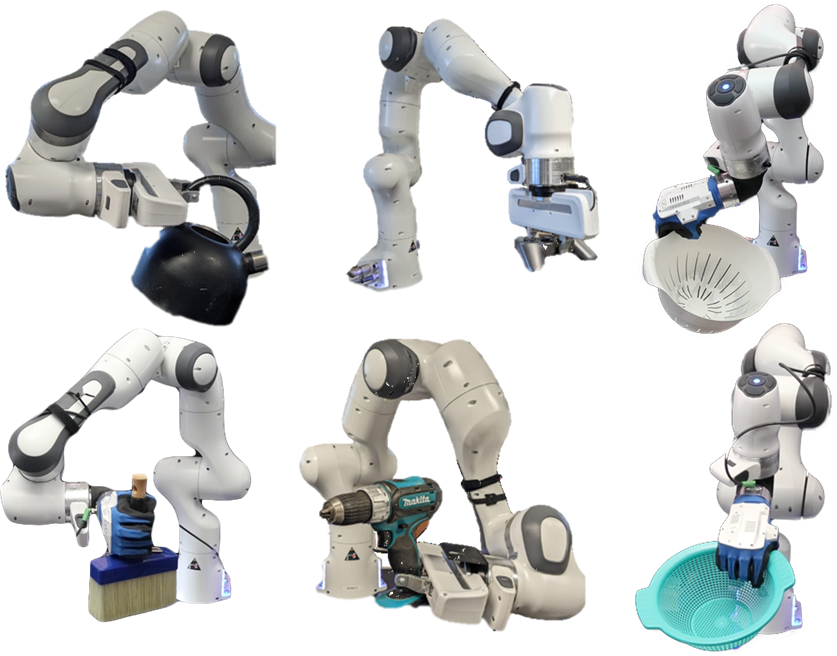
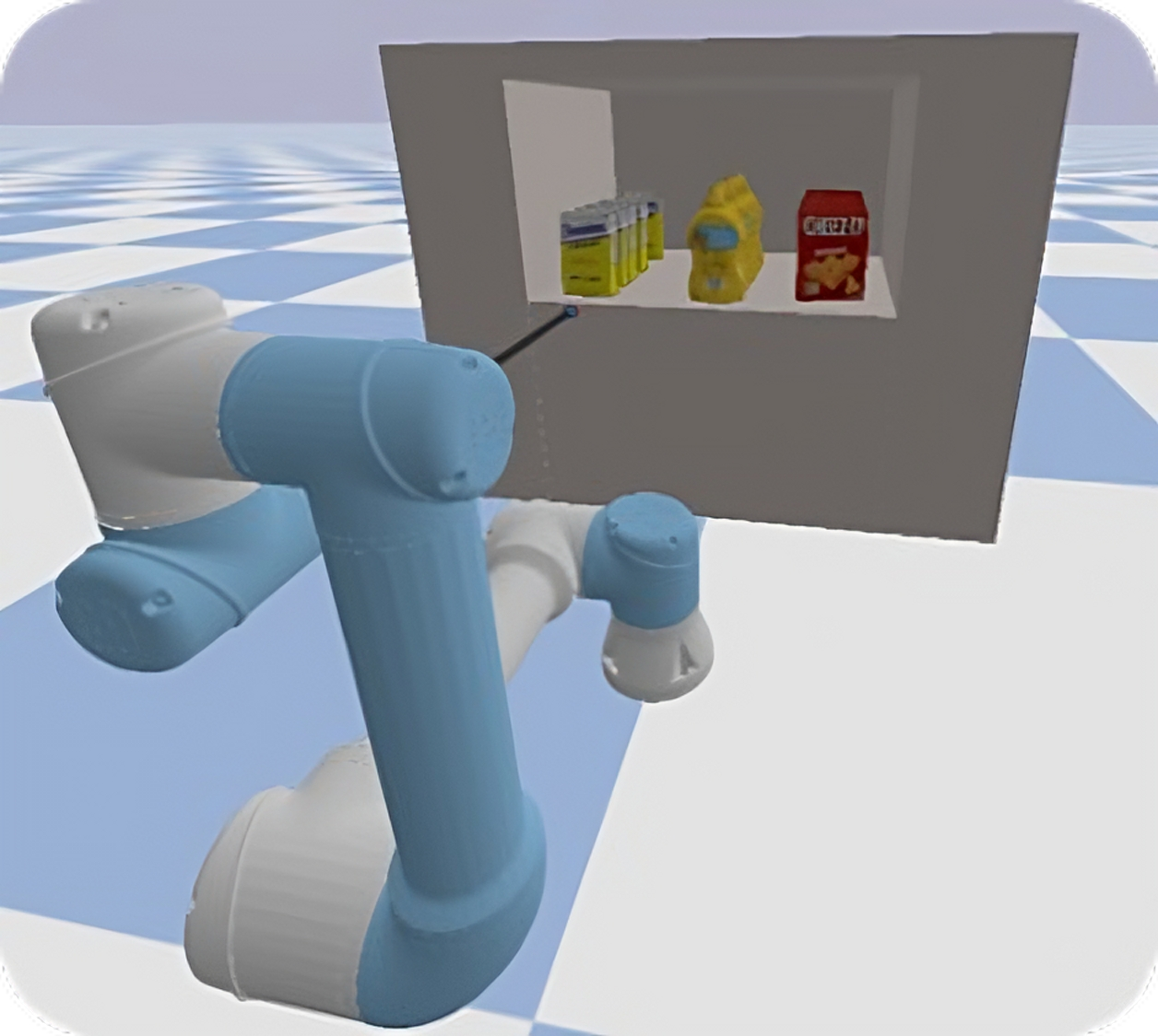
focused on developing innovative tools for planning and control of collaborative robots in
interaction-rich unstructured environments. I work on
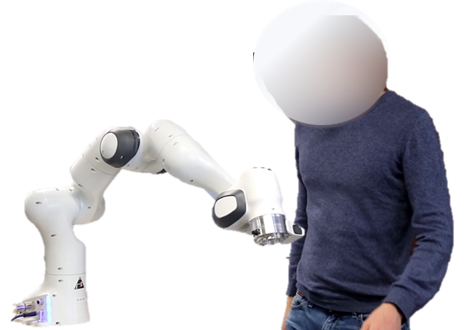
autonomous manipulation and optimal trajectory planning for collaborative robots. My research
combines the fields of robotics, artificial intelligence, and human-robot interaction to create
solutions that enhance the capabilities of robots to work alongside humans and other autonomous
agents. With a strong foundation in motion planning, grasping, and manipulation, I am committed
to
advancing the state-of-the-art in this field and creating more efficient and effective robotic
systems.
I am also
co-founder of XStar Motion, an innovative
start-up which aims at transforming the way the motion of machines is planned.
If you want to know more about my research, projects, and publications, please follow the associated links.