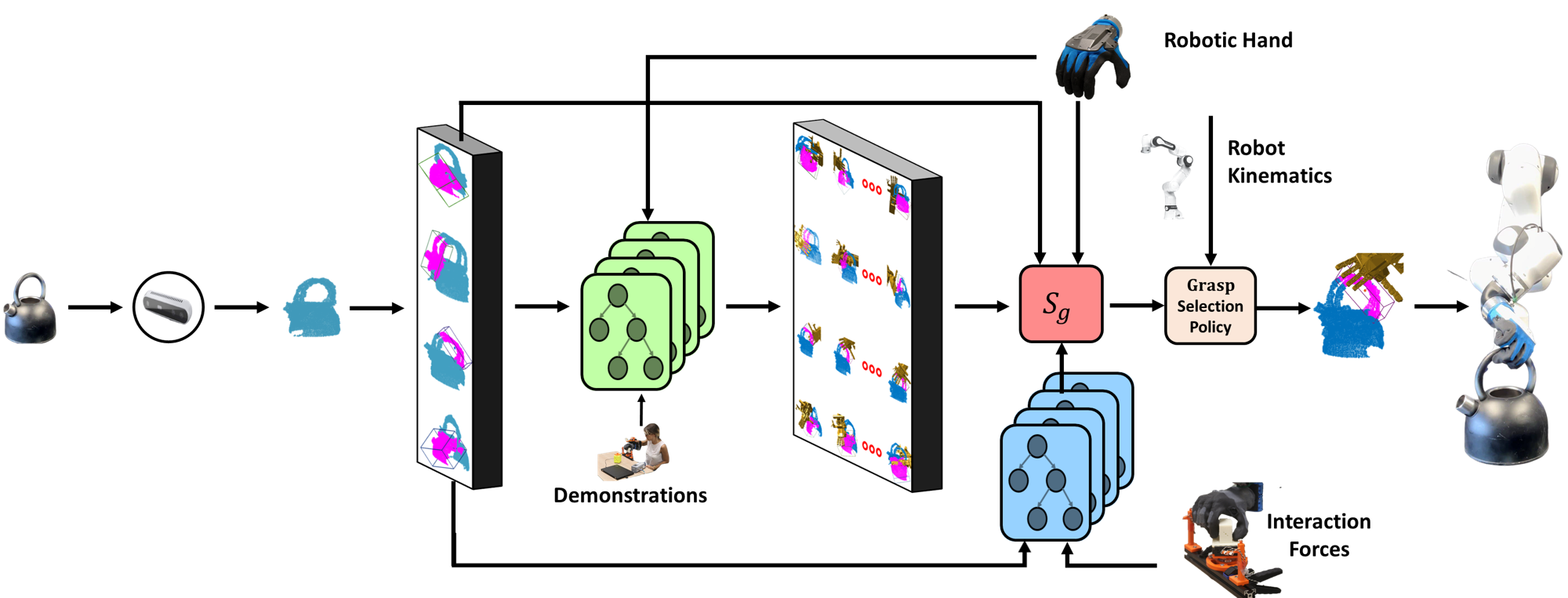
Pipeline of the proposed method Grasp it Like a Pro 2.0. GLP 2.0 starts with the acquisition of a point cloud of the target object. The cloud is decomposed into a generic number N of minimum volume bounding boxes. A model learned from human demonstrations of grasps for exemplary boxes is used to generate a set of 6-DoF grasp poses for the obtained decomposition. A novel grasp quality score, Sg, is introduced based on information about the robotic gripper, the point cloud of the object and the environment, and of the grasp interaction forces estimated using a learned model to rank and select the best grasp among the candidate set.
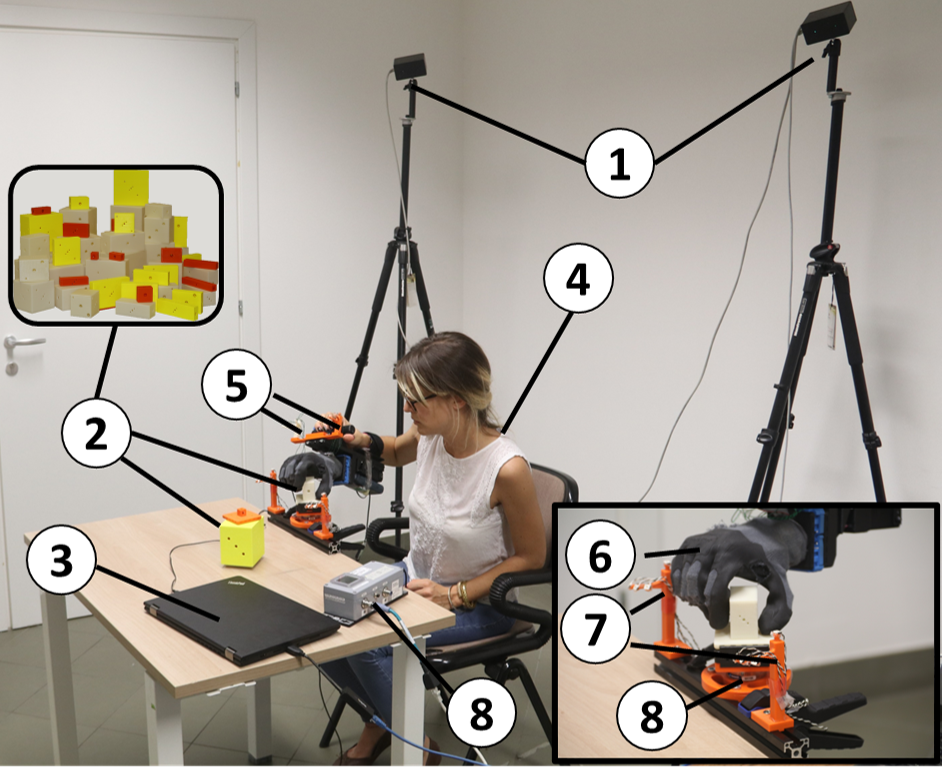
Experimental setup used to record the set of human demonstrations. The PhaseSpace cameras (1) are used to track the pose of the hand using eight hand-fixed markers (5) and eight boxfixed markers (7). A human operator (4) grasps a set of boxes (2) with the Pisa/IIT SoftHand (6). A force torque-sensor (8) is used to record the interaction wrenches. The recorded data are saved on a PC (3), and later used to train a DTR model. Training on a small set of recorded demonstrations of a skilled operator grasping cuboids, the robot is able to generate a grasp pose for a generic object.
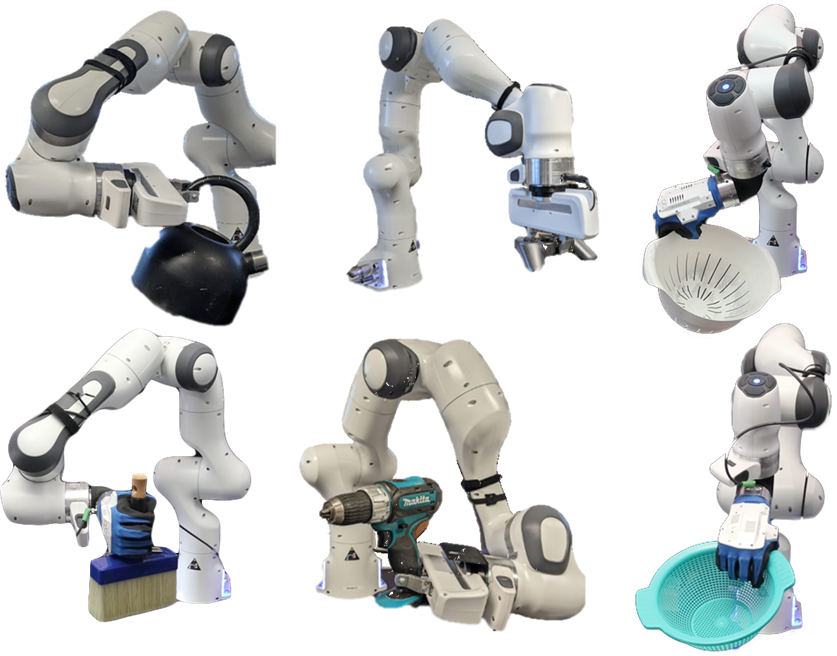
Frames of a Franka Emika Panda manipulator grasping objects with the Pisa/IIT SoftHand and the Franka Hand.
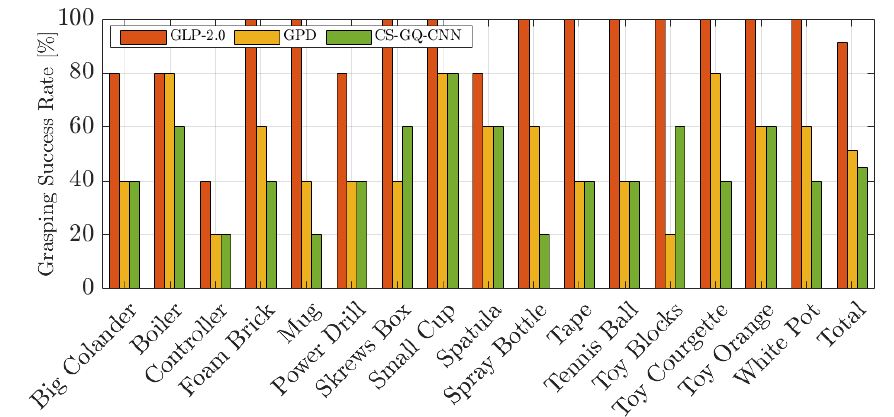
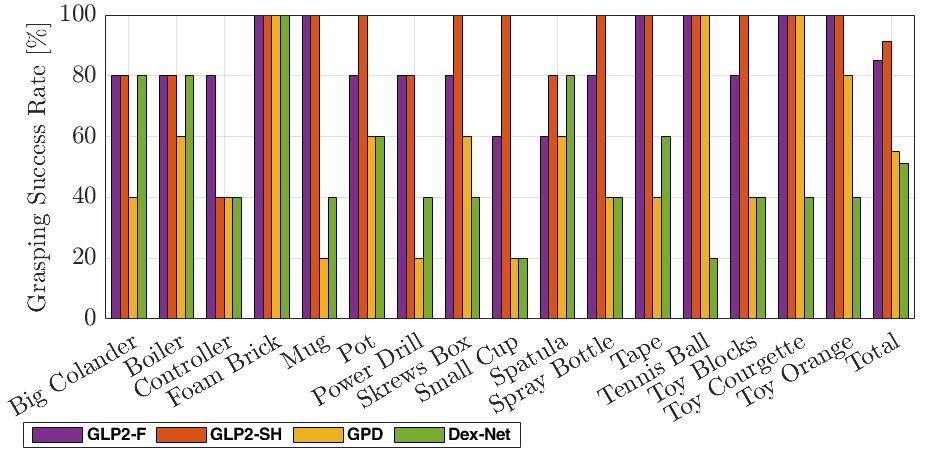
Results of the comparison with GPD and CS-GQ-CNN using the Pisa/IIT SoftHand. GLP 2.0 outperforms both baselines on the tested objects, relying on a smaller set of demonstrations.